mineral processing plant control Strategies
In
mineral processing plant , although there may be elements of discrete I/O in
control strategies (e.g., opening or closing cyclones to maintain header
pressure), they are normally designed to continuously modulate manipulable
variables (e.g., feeder speed, valve position, pump or mill speed) to ensure
that the controlled variables (e.g., ore flow, water flow, tank level, particle
size) are at or near the set-point value. For that reason the emphasis in this
section is on continuous control, and Figure 1 conveniently summarizes the
levels of continuous control, while offering insight into the structure of
control strategies.
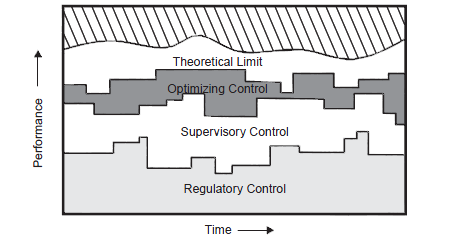
Fig 1. The levels of continuous control
Fig 1
illustrates that there is some performance benefit associated with each level
of control strategy. It also carries the important implicit message that
control strategies are hierarchical. That is, one cannot build an effective
supervisory strategy if the regulatory strategies underpinning it are ineffective.
This is
not merely a point of academic interest, because numerous studies in all
process industries have highlighted unexpectedly poor performance of the
low-level controls. A similar argument can be advanced for optimizing controls,
which must rely on the supervisory level.
The
definitions of what fits where in this hierarchy are debatable, but some
general attributes are associated with each level.
Regulatory
Control Strategies
_ Strategies are mostly implemented with feedback loops aimed at stabilizing
process inputs, such as ore and water flows, or bin and tank levels.
_ These loops almost always involve the PID controller, generally using only
the Proportional Integral-Differential (PID) functions.
_ Typical control intervals range from one to a few seconds.
_ They are always implemented on the DCS or PLC operating software.
_ Occasionally dead-time compensation and gain scheduling are required
(e.g., long conveyor belts and multiple feeders).
_ For highly nonlinear systems, it may be necessary to resort to other
control options, such as fuzzy logic or self-tuning controllers.
Supervisory
Control Strategies
_ These strategies calculate set points
for the regulatory strategies in the pursuit of some operational objective,
such as maximum throughput subject to a maximum particle constraint.
_ The simplest form may be the cascade
PID loop that delivers a set point to the associated regulatory.
_ Typical control intervals range from a
few seconds to a couple of minutes.
_ They are almost always implemented on a
dedicated PC on the DCS/PLC network.
_ Strategies are frequently multivariable
in nature; for example, attempting to control grinding circuit product particle
size and recirculating load .
_ They are prone to interaction problems;
i.e., the multivariable nature of the problem leads to competition
among the supervisory loops.
_ They often require sophisticated
approaches, such as heuristic, model-based, or blended approaches.
Optimizing
Control Strategies
_ These strategies calculate operating
objectives for the supervisory strategies, based on some economic objective
function.
_ Typical control intervals range from a
few minutes to an hour.
_ They are almost always implemented on a
dedicated PC on the DCS/PLC network.
_ They tend to employ optimization
techniques based on plant experimentation (SSDEVOP) or analytical techniques
(e.g., multivariable search) that employ adapted process models.
_ They tend to look at the coordination
of several circuits to ensure that local optimization of each does not lead to
the suboptimization of the whole beneficiation plant.
Using a
primary ball mill circuit, we can create a simple illustration of the structure
outlined in Figure 2. Figure 2A shows the process flow, instrumentation layout,
and typical regulatory controls for such a circuit. It should be noted that
control strategies are usually documented through a combination of loop
narratives and Process/Piping and Instrumentation Diagrams. In both cases,
there are standards for preparation one should use, but in this example a
quasi-PID representation is employed. There are four regulatory loops to
stabilize inputs and internal variables. R1 is a PID loop that measures
tonnage, W, and regulates feeder speed, VS, to maintain the set point, entered
by the operator. R2 and R3 are PID water flow stabilization loops that ensure
flow set points are maintained in the presence of variation in supply pressure.
R4 is a sump-level control PID loop that would ensure the tank does not run dry
or overflow.

Fig2A An illustration of regulatory control
in a primary ball mill circuit
There are
a number of possible operating objectives for such a circuit, but here we
assume that the goal is to maintain the product particle size at some set
point, and to manage the circulating load so as to ensure maximum ore feed rate
while avoiding a ball mill overload. The approach adopted for this example is
to employ cascade PID loops, one delivering a set point to the sump water
addition to maintain particle size, and the other sending a set point to the
tonnage loop to maintain circulating load.
This is
shown in Figure 2B. Here S1 is the standard ratio controller aimed at
maintaining a constant slurry density in the fresh feed to the mill, which
could just as easily have been shown at the regulatory level. S2 is the
supervisory cascade loop to regulate circulating load, and S3 is the particle
size cascade loop. For completeness, the optimizing strategy is depicted as O1,
and it endeavors to ensure that maximum revenue is generated across the plant
by avoiding capacity imbalances that would lead to downtime, and by continually
reevaluating the optimum grinding circuit throughput and particle size for
maximum plant net revenue.

Fig2B. An iIlustration of supervisory and
optimizing control in a primary ball mill circuit
The
development of a successful control strategy requires a very good understanding
of process dynamics and operating characteristics, a broad knowledge of control
tools, and the ability to clearly articulate the control problem; that is, what
needs to be done and where the priorities lie. At a minimum, it will comprise a
blend of regulatory and supervisory techniques that must work well, both independently
and together. Although it has not been discussed previously, good operator
training and strategy documentation are also required to achieve the benefits
attached to the investment. In the past, the mineral processing control
community has been rather poor at the last two steps, and as a consequence, has
frequently been condemned to repeat history when new process control people are
brought on-board.



评论
发表评论